ID: 10976, CUP C49H23000120007
Fondo Next Generation EU
M4C2I2.3

LOGIBIOTECH è capofila del progetto di ricerca SCARATRACTIS, svolto in collaborazione con Degavi Automazione Srl e UNIPR (Università degli Studi di Parma).
Il progetto mira ad aumentare il livello di innovazione tecnologica del sistema automatico di manipolazione e archiviazione di campioni cito-istologici attualmente prodotto da LOGIBIOTECH attraverso soluzioni elettroniche, meccaniche e software che ne migliorino il funzionamento generale e la sicurezza di utilizzo in ambito biomedicale.
In particolare, obiettivo del progetto è lo sviluppo del primo del primo robot SCARA collaborativo senza sensori di coppia interamente realizzato in Italia ed unico sul mercato Europeo. A partire da un manipolatore commerciale si prevedere di effettuare un’ottimizzazione dell’elettronica a bordo del manipolatore e l’implementazione di un controllore interno non chiuso, in modo tale da avere un controllo a basso livello, totale e diretto, dei movimenti del robot. Questo aspetto offre la possibilità di implementare soluzioni modulari e customizzate per applicazioni affini, sempre in ambito biomedicale/farmaceutico. A livello di innovatività ci si pone l’obiettivo di implementare un sistema di rilevazione di impatti privo di sensori di coppia, in modo da ridurre le possibilità di guasto e abbassare i costi di produzione.
Lo sviluppo di un robot con alti standard di collaboratività ha inoltre l’obiettivo di garantire la piena sicurezza del materiale manipolato e dei lavoratori che si trovano ad utilizzarlo e ad interagire con esso.
Andamento del progetto
Al mese 8 (M8) è stato rilasciato il deliverable “Technical Advances” che descrive i lavori portati a termine entro tale mese. In particolare, riporta il modello matematico sviluppato per il controllo del robot, il sistema di controllo proposto e la componentistica meccanica ed elettronica sviluppata.
Al mese 5 (M5) è stata raggiunta la milestone: “Il modello matematico del sistema robotico è stato messo a punto e i suoi parametri cinematici/dinamici sono stimati”.
Al mese 10 (M10) è stata raggiunta la milestone: “La meccanica e l’elettronica del rinnovato robot SCARA collaborativo sono montate e testate.”
Al mese 15 (M15) è stata raggiunta la milestone: “Il sistema di controllo del robot SCARA collaborativo è integralmente implementato e testato, ed è stato messo a punto l’interfacciamento con il software di sistema Logibiotech”.
Al termine dei 18 mesi previsti per il progetto, ci si attende di ottenere un primo prototipo funzionante di robot SCARA collaborativo da utilizzare come elemento fondante dello scanner robotizzato finderFLEX per l’archiviazione dei campioni cito-istologici.
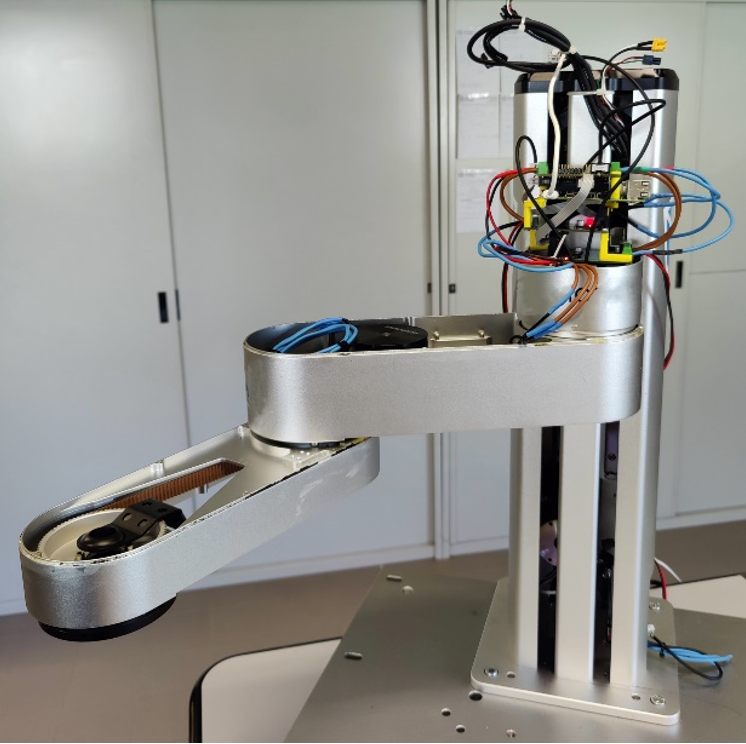
MESE 1: Robot SCARA commerciale disassemblato

MESE 8: Robot SCARA riassemblato con nuova elettronica
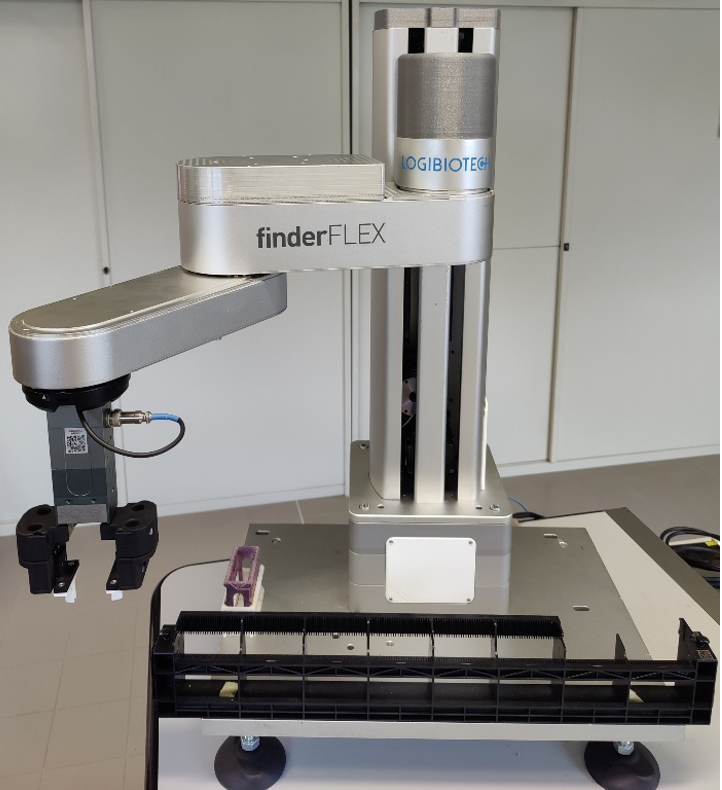
MESE 15: Robot SCARA con nuova elettronica applicato alla movimentazione di vetrini istologici